typical diagram open & closed loop
مشخصات کامل مدارات هیدرولیک حلقه باز ( OPEN LOOP ) و حلقه بسته ( CLOSED LOOP )
با عرض سلام . همانطور که قبلا قول داده بودم در این مقاله میخواهم کم کم وارد بررسی مدارات هیدرولیک سیستم های موبایل هیدرولیک شوم . قبل از این کار باید تفاوت های بین مدارات حلقه باز (OPEN LOOP) و حلقه بسته (CLOSED LOOP) رو شرح بدهم.
در موبایل هیدرولیک ما تقریبا 95 درصد مواقع با مدارات حلقه بسته (CLOSED LOOP) روبرو هستیم.
به طور کلی در مهندسی هیدرولیک ما سه نوع مدار داریم :
1 – مدارات هیدرولیک حلقه باز ( OPEN LOOP CIRCUT )
2 – مدارات هیدرولیک حلقه بسته ( CLOSED LOOP CIRCUT )
3 – مدارات هیدرولیک نیمه حلقه بسته ( SEMI-CLOSED LOOP CIRCUT )
در ادامه مشخصات مدارات نوع اول و دوم را در حد دانش خود توصیف میکنم. در مورد مدارات نوع سوم که مدارات هیدرولیک نیمه حلقه بسته (SEMI-CLOSED LOOP)
هستند . این نکته را بیان کنم که این مدارات ترکیبی از دو نوع مدار دیگر میباشند.
توضیحاتی خلاصه در مورد مدارات هیدرولیک نیمه حلقه بسته ( SEMI-CLOSED LOOP CIRCUT ).
هنگامی که ما برای کنترل یک جک هیدرولیک از شیرهای کنترل جهت از انواع وسط باز، وسط بسته و یا شناور و غیره استفاده میکنیم این مدار از نوع مدار هیدرولیک حلقه باز (OPEN LOOP) است.
ولی هنگامی که از شیر کنترل جهت باز یافت یا Regenerative Valve استفاده میکنیم . روغن هیدرولیک خروجی از جک هیدرولیک دوباره به مدار می گردد . این برگشت روغن باعث افزایش سرعت خود سیلندر میشود . یعنی روغن مستقیم به تانک یا مخزن هیدرولیک وارد نمیشود.
پس به همین دلیل این بخش از مدار را میتوان از نوع مدارات نوع سوم یا نیمه حلقه بسته (SEMI-CLOSED LOOP) بحساب آورد.
در این حالت به مانند یک مدار هیدرولیک حلقه بسته (CLOSED LOOP) که روغن از خروجی عملگر یا اکچویتور برای استفاده به قسمت های دیگر مدار فرستاده میشود، روغن از خروجی جک هیدرولیک برای افزایش سرعت خود جک استفاده شده و به تانک هدایت نمیشود.
اگر از این نوع شیر در طراحی خود استفاده میکنید . توجه به این نکته ضروریست که در این حالت با توجه به برابر شدن فشار در دو طرف پیستون جک هیدرولیک نیروی اعمالی به میزان اختلاف سطح مقطع دو طرف پیستون میباشد.
به عبارت دیگر با زیاد شدن سرعت جک هیدرولیک از قدرت آن کاسته میشود.
یا مثال دیگری در مورد مدارات هیدرولیک نیمه حلقه بسته. در بعضی از پرس های هیدرولیک بزرگ، شیری به نام پیش پر کن یا Prefill Valve وجود دارد . این شیر میتواند روغن هیدرولیک را بدون عبور از پمپ هیدرولیک ، مستقیم از مخزن هیدرولیک به جک هیدرولیک اصلی جهت پر کردن سیلندر وارد کند. این مدار هم از نوع مدارات هیدرولیک نیمه حلقه بسته (SEMI-CLOSED LOOP) میباشد .
در بعضی از یونیت های هیدرولیک با پمپ های دبی بالا در هنگام مکش پمپ، پدیده کاویتاسیون صورت میگیرد. برای جلوگیری از این اتفاق ، مخزن و سطح روغن را با فشاری بالاتر از فشار اتمسفر توسط هوای فشرده تحت فشار قرار میدهند . این عمل به این دلیل انجام میشود که روغن با فشار به دهانه مکش پمپ تزریق شود. این هم نمونه ای از مدارات هیدرولیک نیمه حلقه بسته (SEMI-CLOSED LOOP) است.
حالا با توجه به توضیحات مختصری که در مورد مدارات هیدرولیک نیمه حلقه بسته (SEMI-CLOSED LOOP) دادم . به توصیف مدارات نوع اول و دوم میپردازم.
برای شروع بحث ، توضیح کوتاهی در مورد مدارات حلقه باز (OPEN LOOP) و حلقه بسته (CLOSED LOOP) بیان میکنم که برای فهم بحث بی تاثیر نیست .
در علم کنترل ، به مداراتی که از عملگرهای آنها که در انتهای چرخه کنترلی هستند و هیچ فیدبکی از آنها گرفته نمیشود مدارات حلقه باز (OPEN LOOP) میگویند. به عبارت دیگر در مدارات حلقه باز (OPEN LOOP) هیچ کنترلی بر روی صحت عملکرد عملگرها و خروجی مدار کنترلی نیست.
در بعضی از سیستم ها به جهت کنترل صحت عملکرد عملگرها از خروجی آنها فیدبک گرفته میشود . در صورت مشاهده شدن خطا در رفتار عملگر، سیستم کنترل ، فرمان خود را اصلاح کرده و فرمان جدیدی صادر میکند.
به عبارت دیگر سیستم کنترل، هر لحظه فرمان های خود را به جهت عملکرد بهتر عملگرها اصلاح میکند.
این سیستم یک سیستم حلقه بسته (CLOSED LOOP) میباشد.
برای روشن شدن بحث یک مثال میزنم:
فرض بفرمایید در یک دستگاه CNC، سیستم کنترل فرمان چرخش شفت بال اسکرو را صادر میکند . این فرمان به جهت حرکت میز دستگاه به اندازه 20 میلی متر میباشد . بال اسکرو شروع به حرکت میکند و به اندازه 20 میلی متر میز دستگاه حرکت میکند. برای کنترل، تعریف شده است که هر دور چرخش بال اسکرو معادل 2 میلی متر است. پس کنترل، شفت بال اسکرو را به میزان 10 دور می چرخاند تا میز به اندازه 20 میلی متر حرکت کند.
این نوع کنترل را کنترل حلقه باز میگویند . چرا که هیچ فیدبکی از صحت حرکت بال اسکرو و میز گرفته نمیشود. حال اگر یک خط کش دیجیتال بر روی میز دستگاه نصب شود که موقعیت میز را به کنترل گزارش کند . سیستم کنترل میتواند از صحت حرکت میز مطلع شود. یعنی کنترل با خواندن عدد خط کش میتواند بفهمد که میز به اندازه 20 میلیمتر حرکت کرده است یا نه.
اگر پس از 10 دور چرخش شفت بال اسکرو، میز به اندازه فرضا 19.5 میلی متر ( مثلا به دلیل لقی کوپلینگ ) حرکت کرده باشد . سیستم کنترل، فرمان خود را اصلاح میکند و شفت را به میزان 0.5 میلی متر دیگر می چرخاند. با این کار میز به اندازه صحیح 20 میلی متر جابجا شود.
این نوع کنترل را سیستم حلقه بسته (CLOSED LOOP) می گویند.
پس یک سیستم حلقه بسته (CLOSED LOOP). به جهت اصلاح فرمانها و کنترل دقیق بر روی عملکرد عملگرها، از خروجی سیستم فیدبک میگیرد.
شاید یکی از دلایل نامیدن مدارات هیدرولیک حلقه بسته (CLOSED LOOP). به دلیل گرفتن فیدبک های هیدرولیکی از عملگرها و اصلاح فرمان های صادر شده توسط شیرهای کنترلی میباشد.
مدارات هیدرولیک حلقه باز (OPEN LOOP) و حلقه بسته (CLOSED LOOP) دارای خصوصیاتی هستند که در زیر به آنها اشاره میکنم .
خصوصیات سیستم های هیدرولیک حلقه باز (OPEN LOOP) :
به طور کلی در سیستم ها یا مدارات هیدرولیک حلقه باز (OPEN LOOP). روغن توسط پمپ هیدرولیک که در این مدارات غالبا از یک پمپ هیدرولیک دبی ثابت
(fixed–displacement pump). استفاده میشود از مخزن مکش شده و به مدار هیدرولیک تزریق میشود.
روغن پس از عبور از شیرهای کنترل هیدرولیکی به عملگر مربوطه رسیده و کار مکانیکی مورد نیاز را انجام میدهد. سپس روغن دوباره در مسیر برگشت از شیرهای کنترل هیدرولیکی عبور میکند. و به تانک یا مخزن هیدرولیک که حجم ذخیره روغن هیدرولیک آن حداقل ( بدون مدار خنک کننده و فیلتراسیون ) 3 تا 5 برابر ظرفیت عملگرهای مدار است برگشت داده میشود.
مدار هیدرولیک حلقه باز
در یک سیستم مدار حلقه باز (OPEN LOOP). خط مکش پمپ هیدرولیک زیر سطح روغن هیدرولیک در مخزن روغن قرار دارد. فشار هوای مخزن هم با فشار اتمسفر برابر است.
با شروع چرخش پمپ هیدرولیک و ایجاد فشار منفی در دهانه خط مکش. فشار اتمسفر هوای بالای سطح روغن هیدرولیک، سیال را به درون خط مکش پمپ هیدرولیک هل میدهد. فشار هوای اتمسفر برابر با 1 بار و فشار خط مکش پمپ هیدرولیک در حالت استاندارد برابر با -0.2 یا 0.8 فشار اتمسفر است.
این اختلاف فشار باعث حرکت روغن هیدرولیک از فشار بالاتر ( 1 بار ) به فشار پایین تر ( 0.8 بار ) میشود.
در یک سیستم حلقه باز (OPEN LOOP). کنترل جهت و دبی ( سرعت عملگرها مثل جک هیدرولیک و یا هیدروموتور) و فشار روغن هیدرولیک بوسیله شیرهای سنتی و به نسبت حجیم دایرکشنال (Directional Valve) انجام میشود. برای کنترل سرعت عملگرها در مدارات حلقه باز (OPEN LOOP). باید به طور جداگانه از شیرهای کنترل فلو استفاده میشود.
عملکرد هر شیر هیدرولیک در مدار حلقه باز (OPEN LOOP) مشخص و مستقل از دیگر شیرها میباشد.
در سیستم های هیدرولیکی حلقه باز (OPEN LOOP) معمولا فشارها و دبی ها ثابت میباشند و توسط اپراتور در یک عدد مشخص تنظیم و قفل میشود.
یک مدار هیدرولیک حلقه باز
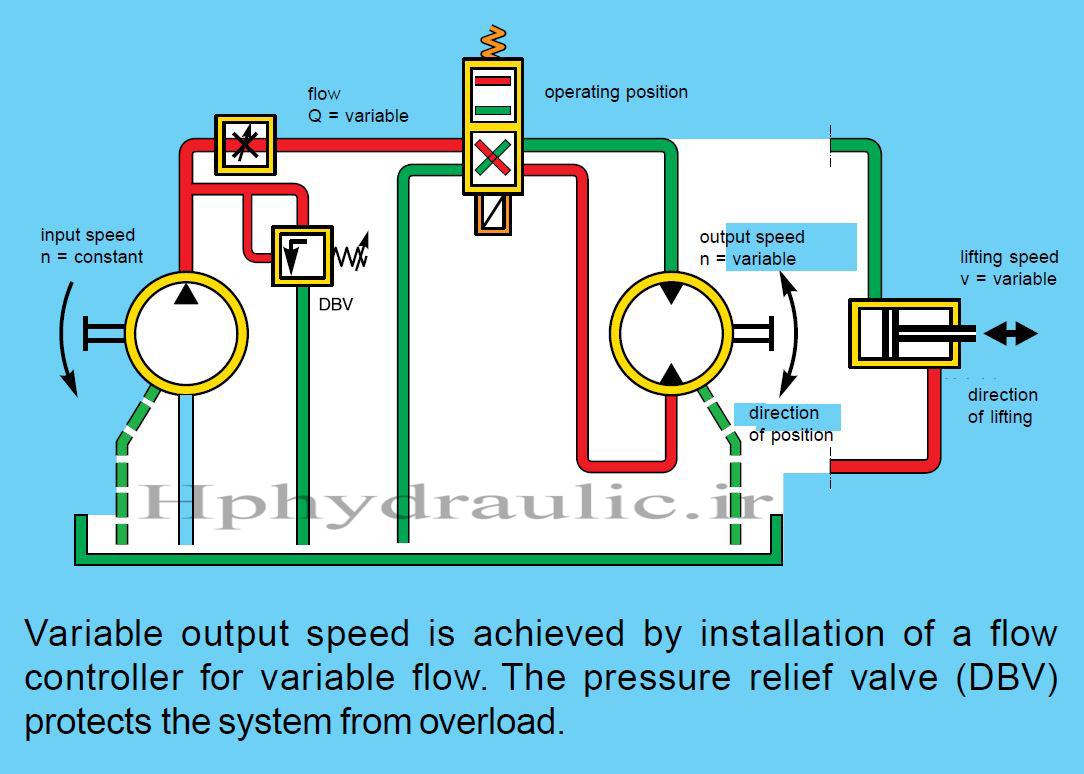
در عکس بالا روغن هیدرولیک توسط یک پمپ هیدرولیک دبی ثابت توسط خط مکش آبی رنگ که در زیر سطح روغن است مکیده می شود. در خروجی پمپ هیدرولیک، فشار روغن هیدرولیک توسط یک شیر کنترل ماکزیمم فشار (DBV) کنترل میشود. و پس از عبور از شیر قابل تنظیم کنترل دبی وارد شیر کنترل جهت میشود.
روغن هیدرولیک پس از عبور از شیر کنترل جهت و مشخص شدن مسیر، وارد عملگر یا اکچویتور میشود. کار مکانیکی مورد نیاز را انجام داده . دوباره به شیر کنترل جهت بر میگردد. در نهایت روغن هیدرولیک به تانک یا مخزن هیدرولیک برگشت داده میشود.
خصوصیات سیستم های هیدرولیکی حلقه بسته ( CLOSED LOOP ):
در یک مدار هیدرولیک حلقه بسته (CLOSED LOOP). روغن هیدرولیک تحت فشار از خروجی پمپ هیدرولیک به یک عملگر یا اکچویتور مثل یک هیدرو موتور وارد میشود. پس از چرخاندن شفت هیدروموتور و انجام کار مکانیکی مورد نیاز، دوباره به دهانه مکش پمپ وارد میشود.
اولین سطح از یک مدار هیدرولیک حلقه بسته
با توجه به شکل بالا میتوان فهمید که روغن در یک سیستم هیدرولیک حلقه بسته (CLOSED LOOP) یک مدار بسته را طی میکند. این یکی از دلایل نامگذاری این نوع از سیستم های هیدرولیک به مدار حلقه بسته (CLOSED LOOP) است.
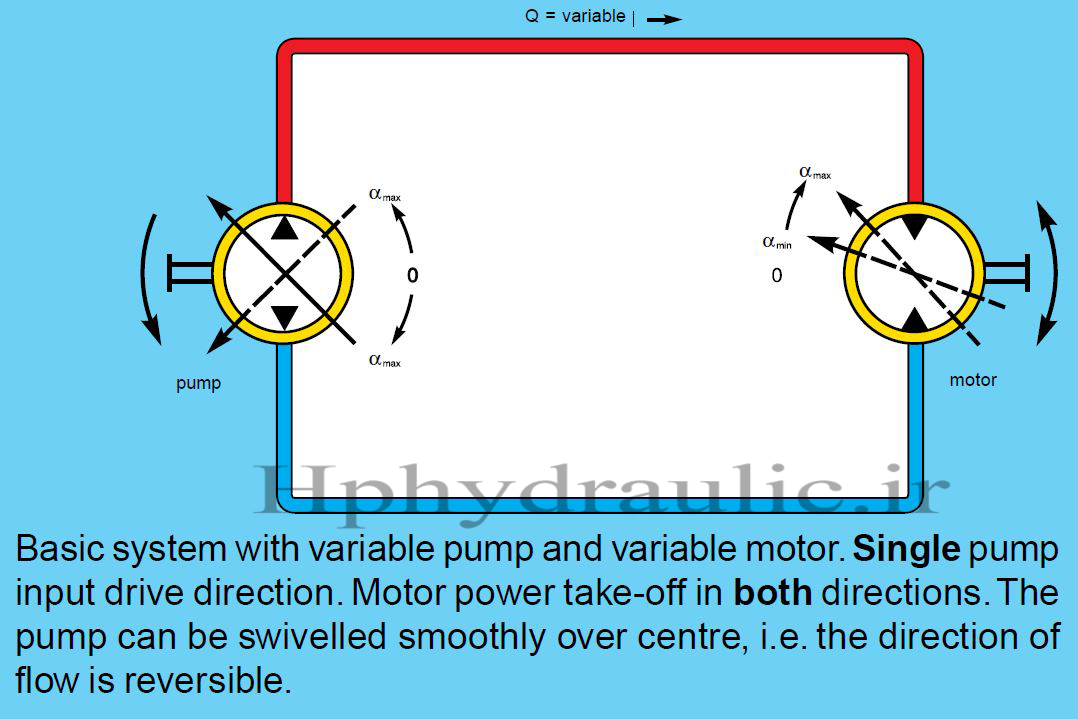
در یک سیستم هیدرولیک حلقه بسته (CLOSED LOOP) با کنترل زاویه سواچ پلیت پمپ هیدرولیک میتوان دبی خروجی از پمپ را کنترل نمود. پس در یک سیستم هیدرولیک حلقه بسته (CLOSED LOOP) برای کنترل دبی خروجی پمپ، نیاز به شیر فلو کنترل مجزا نیست.
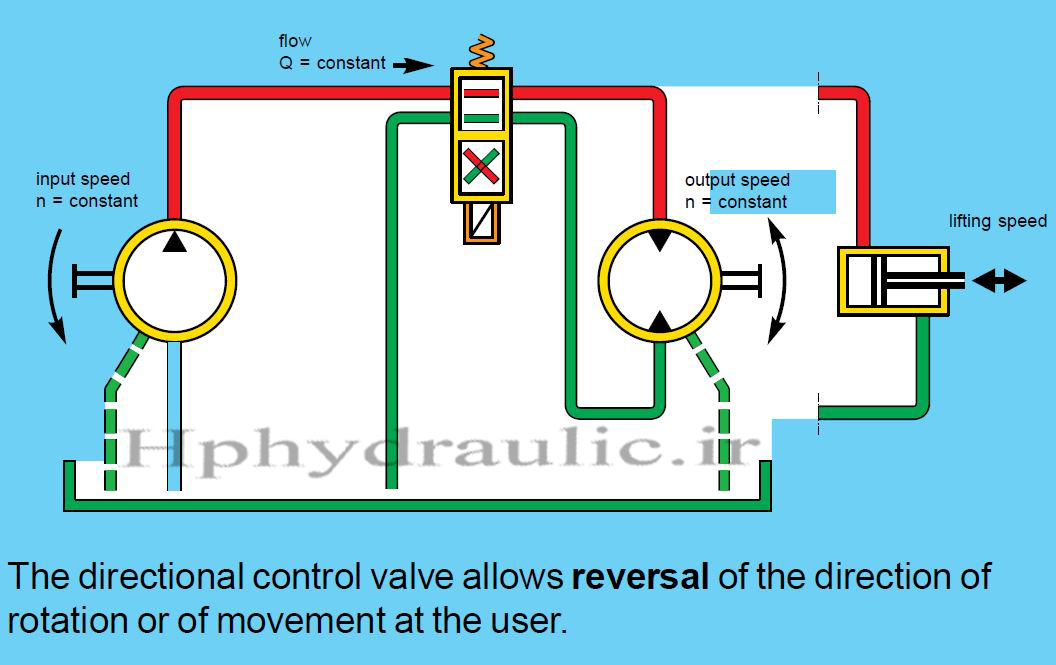
همینطور برای معکوس شدن جهت حرکت عملگر هم نیاز به شیر کنترل جهت مجزا نیست. با تغییر زاویه سواچ پلیت از مثبت به منفی میتوان جهت مکش و فشار پمپ هیدرولیک را تغییر داد.
در شکل بالا با تغییر زاویه آلفا در پمپ هیدرولیک خط فشار قرمز رنگ به خط مکش آبی رنگ تبدیل میشود. به عبارت دیگر اگر دو پورت ورودی اصلی پمپ مدار بسته را A و B بنامیم. این پمپ هیدرولیک می تواند روغن را از پورت A مکش کرده و به پورت B تزریق کند. با تغییر زاویه سواچ پلیت میتواند روغن هیدرولیک را از پورت B مکش کرده به پورت A تزریق کند. با این کار چون جهت حرکت روغن هیدرولیک معکوس میشود، پس جهت حرکت هیدروموتور هم در شکل بالا بدون وجود شیر کنترل جهت تغییر خواهد کرد.
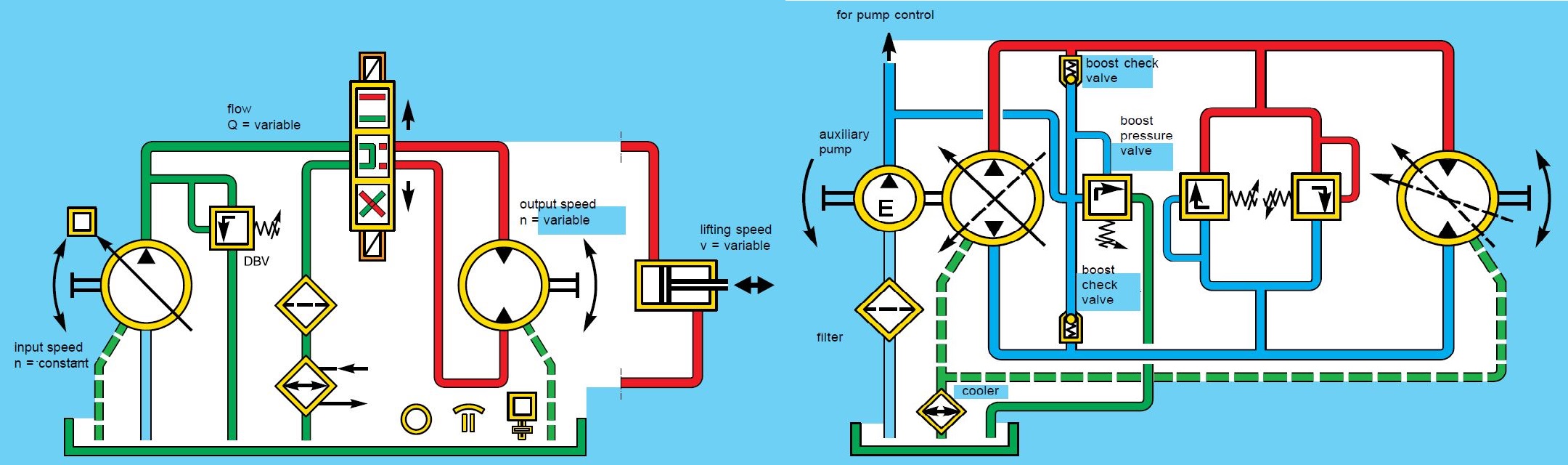
صد البته که یک مدار هیدرولیک حلقه بسته (CLOSED LOOP) به صورت بالا امکان راه اندازی ندارد. برای راه اندازی یک مدار هیدرولیک حلقه بسته (CLOSED LOOP) به مداری مثل سیستمی که در عکس زیر مشخص است نیاز میباشد. انشالله در آینده یک سیستم هیدرولیک حلقه بسته (CLOSED LOOP) رو به صورت کامل توصیف میکنم.
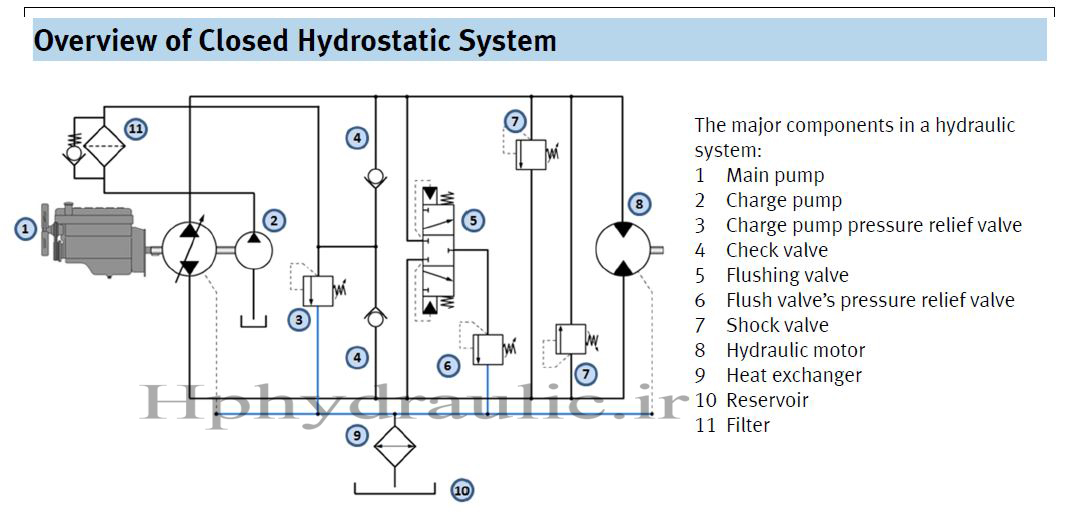
نگاه کلی به یک سیستم هیدرولیک حلقه بسته
در انتها به صورت خلاصه تفاوت، مزایا و معایب دو سیستم حلقه باز (OPEN LOOP). و حلقه بسته (CLOSED LOOP) را بیان میکنم:
1- استفاده از پمپ های دبی ثابت در مدار هیدرولیک حلقه باز (OPEN LOOP). و پمپ های دبی متغیر در مدارات هیدرولیک حلقه بسته (CLOSED LOOP).
2 – برگشت روغن هیدرولیک به تانک یا مخزن هیدرولیک در مدار حلقه باز (OPEN LOOP). و برگشت به دهانه مکش پمپ در مدار حلقه بسته (CLOSED LOOP).
3 – ورود روغن با فشار اتمسفر به دهانه مکش پمپ هیدرولیک در مدار حلقه باز (OPEN LOOP). و ورود روغن با فشار شارژ پمپ به دهانه مکش پمپ هیدرولیک در مدار حلقه بسته (CLOSED LOOP).
4 – فشارهای معمولا پایین و دبی های ثابت در مدارات حلقه باز (OPEN LOOP). و فشارهای بالا و دبی های متغیر در مدارات حلقه بسته (CLOSED LOOP).
5 – استفاده از شیرهای دایرکشنال سنتی و حجیم در مدارات حلقه باز (OPEN LOOP). و استفاده از شیرهای پروپورشنال و کم حجم در مدارات حلقه بسته (DCLOSE LOOP).
6 – ارزان بودن قطعات و شیرها در مدارات حلقه باز (OPEN LOOP). و گران بودن آنها در مدارات حلقه بسته (CLOSED LOOP).
7 – نگهداری و تعمیرات راحت قطعات و عیب یابی آسان مدار در سیستم حلقه باز (OPEN LOOP). و نگهداری و تعمیرات سخت و کارشناسی و عیب یابی تخصصی در مدارات پیچیده سیستم های حلقه بسته (CLOSED LOOP).
8 – اتلاف انرژی و تولید گرما و بازده پایین به دلیل ماهیت و ساختار قطعات و سیستم در مدارات حلقه باز (OPEN LOOP). و بازدهی به مراتب بالاتر و اتلاف انرژی و تولید حرارت کمتر در مدارات حلقه بسته (CLOSED LOOP).
9 – حجم زیاد مخزن ذخیره روغن هیدرولیک و در نهایت حجم زیاد سیستم در مدارات حلقه باز (OPEN LOOP). و حجم کوچک مخزن و سیستم در مدارات حلقه بسته (CLOSED LOOP).
10 – مدار و قطعات بدون نیاز به هواگیری و دفع هوای مخلوط و حرارت روغن در مخزن در مدارات حلقه باز (OPEN LOOP). و نیاز به هواگیری دقیق قطعات به دلیل برگشت روغن مخلوط با هوا به پمپ هیدرولیک و ایجاد پدیده مضر کاویتاسیون در سیستم حلقه بسته (CLOSED LOOP).
11 – سایز مش بندی بالای فیلترها ( بالای 10 میکرون ) و ارزان بودن و کولرهای بزرگ و حجیم در مدارات حلقه باز (OPEN LOOP). و سایز مش بندی ریز ( زیر 10 میکرون ) و گران بودن و خنک کننده های به مراتب کوچکتر در مدارات حلقه بسته (CLOSED LOOP).
12 – مدارات و شیرهای مستقل از هم در سیستم های حلقه باز (OPEN LOOP). و مدارات یکپارچه و متمرکز در سیستم های حلقه بسته (CLOSED LOOP).
13 – گزینه های کنترلی کم به دلیل نبود شیرها و امکانات با کاربردهای خاص در مدارات حلقه باز (OPEN LOOP). و گزینه های کنترلی زیاد در مدارات حلقه بسته (CLOSED LOOP).
عذر خواهی میکنم که به صورت خلاصه بیان کردم. شاید بعضی از موارد روشن نباشه ولی انشالله در مقاله های بعدی این مباحث و اختلافات و مشخصات به صورت کاملا روشن بیان میشه.
در انتها برای تک تک شما عزیزان آرزوی موفقیت و سعادت از درگاه خالق مهربان را دارم.
استفاده از کل یا بخشی از مقاله در موارد آموزشی با ذکر نام منبع بلا مانع است .
مهر ماه 1399
سید مجید حقیقت پژوه





